 |
全長 500mm 全幅 400mm 奥行き 150mm 足裏サイズ 77x100mm (片足) 対角最大長 117mm 重量 3.6kg 開発環境 GDL |
|---|
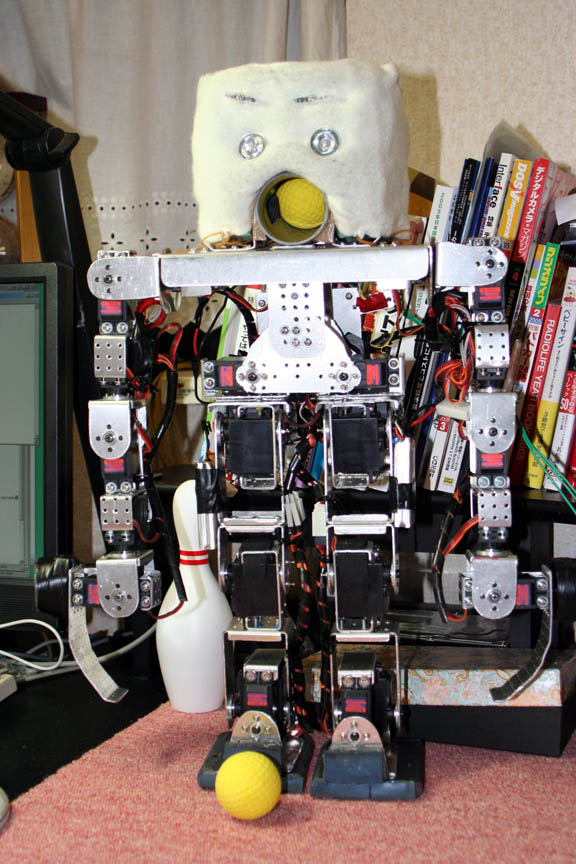
BABY ROBO
初めて製作した二足歩行ROBOを紹介します。
会社のイベント参加用に製作。設計開始から、1ヶ月程で,よく転びますが、何とか歩行に成功。
その後、モーション作成、ジャイロ組み込み等を行い、トータル2ヶ月で、横歩き、後退、左右転回、起上り(うつ伏せ、あお向け)、ボール拾い、ボール発射口入れ(頭の上から)、つま先ハイハイ、ボタン押し、等の動きができるようになりました。
但し,ジャイロは結局上手く組み込めず、イベント当日は外して挑みました。
結果はパソコントラブルもあり散々でした。来年に向けてはレベルアップを目指したい。
|
全長 500mm 全幅 400mm 奥行き 150mm 足裏サイズ 77x100mm (片足) 対角最大長 117mm 重量 3.6kg 開発環境 GDL |
|---|
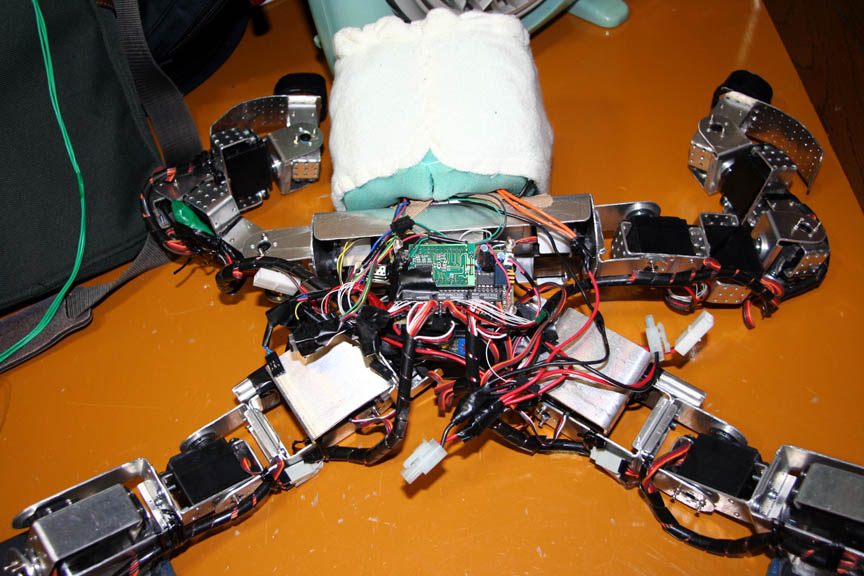
後ろ姿
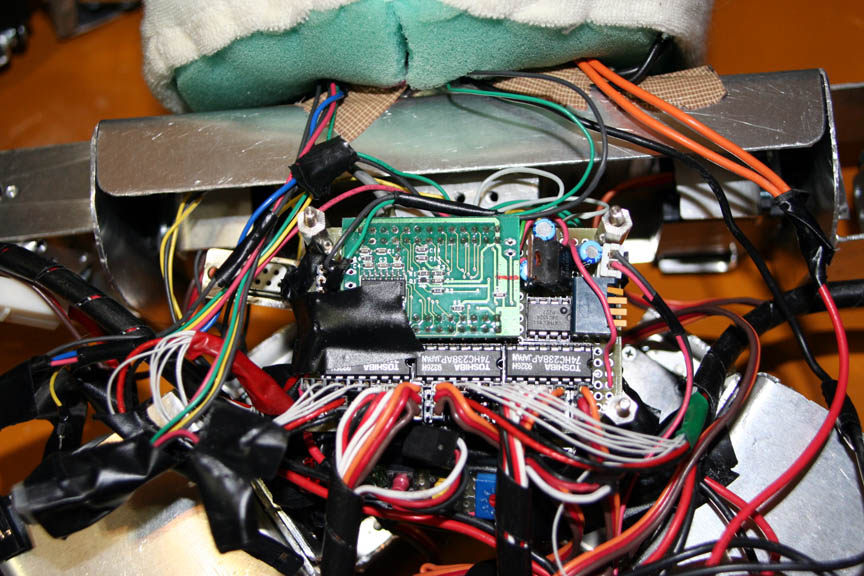
コントローラ (LBC+E-VISをベースに改造して製作)
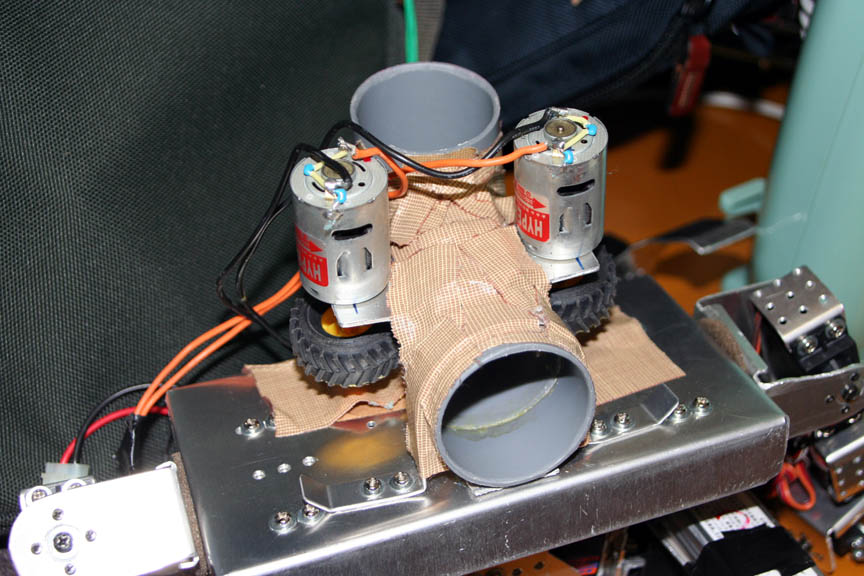
顔内部のボール発射機構 (タイマーVポートでモータ回転数を制御)
07/02/25 23:38:11
メールアドレス: yinagaki@ceres.dti.ne.jp